轮式巡检机器人

实现功能
1、机器人自主巡检:巡检机器人具备全自主巡检功能,全自主巡检又包括例行和特巡两种方式。机器人可根据预先设定的巡检内容、时间、周期、路线等参数自主完成巡检任务,也可由操作人 员遥控机器人完成巡检任务。
2、机器人遥控巡检:巡检机器人具备人工遥控巡检功能,可由操作人员遥控机器人完成巡检任务。人工遥控巡检通过远程遥控机器人行驶、云台动作、摄像机调焦、红外热像仪操作、可见光和红外数据采集等控制动作实现。
3、机器人自主充电:机器人具备自主充电功能,电池电量不足时能够自动返回充电室,能够与充电室内充电设备配合完成自主充电。
4、对讲与喊话:机器人和监控后台应均配备对讲系统(机器人应配备外放喇叭),并能实现双向语音传输。
5、实时图像监控、图像识别功能:对可见光摄像机和红外摄像仪进行实时视频显示,配合遥控和自动巡视功能,实现操作人员的后台巡视及实时检测数据的存储,智能选件机器人搭配高清摄像头,具备自动对焦功能,支持遥控拍照、摄像和定时,定点自动拍照、摄像。
6、后台功能:监控后台应至少包括实时监视、机器人实时状态控制、机器人巡视任务管理、数据查询统计、电子地图、系统互联、系统配置七个功能模块。
7、数据查询统计:数据查询统计应包括巡检点位数据查询、告警信息查询、巡检数据统计和缺陷异常分析等内容,查询支持时间、区域、类型等范围的设定。所有报表、报告具备查询、打印、导出等功能,导出功能支持EXCEL或者WORD格式。对温度、压力等模拟量提供历史曲线展示功能。
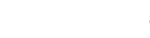
性能参数
技术支持
有关技术方案详请及业务咨询,请拨打:13366653503